



еЊвЊЃКНЈСЂСЫАќРЈЦћТжЛњЁЂЗЂЕчЛњЁЂЕїЫйЦїКЭРјДХЕїНкзАжУдкФкЕФШЋЯЕЭГЗТецФЃаЭЃЌБржЦСЫЗТецШэМўЃЌдкФЃФтЗЂЕчЛњзщЩЯНјааСЫШ§ЯрЭЛШЛЖЬТЗЙЪеЯв§Ц№ЕФЪЇВНЪЕбщКЭЗТецЗжЮіЃЌЪЕбщНсЙћбщжЄСЫЗТецНсЙћЕФе§ШЗадЁЃЖдФГЕчГЇ300 MWЦћТжЗЂЕчЛњНјааСЫШ§ЯрЖЬТЗЙЪеЯв§Ц№ЪЇВНЕФЗТецбаОПЃЌВЂЖдШ§зшПЙдЊМўЪЇВНБЃЛЄКЭИФНјаЭШ§зшПЙдЊМўЪЇВНБЃЛЄНјааСЫећЖЈМЦЫуМАЗжЮіЁЃ 3ЁЁЗТецКЭЪЕбщНсЙћЖдБШ ЭЈЙ§ЖдЪЕбщВЈаЮКЭЗТецВЈаЮЕФБШНЯЃЌПЩвдПДГіЫљВЩгУЕФЪ§бЇФЃаЭЪЧе§ШЗЕФЃЌЪ§жЕЫуЗЈвВФмТњзуМЦЫуЕФОЋЖШвЊЧѓЁЃеёЕДжааФЪЧЯЕЭГеёЕДЪБЕчЦјСПБфЛЏ ОчСвЕФвЛПщЧјгђ(ЛђвЛЕу)ЃЌЫќЕФЬиЕуЪЧЕчбЙЕјТф ЮЊбЯжиЃЌЪЕбщгыЗТецНсЙћБэУїЯпТЗзшПЙЕФДѓаЁгыеёЕДжааФЕФЮЛжУУмЧаЯрЙиЁЃ ЗЂЕчЛње§ГЃдЫааЪБЕФЙЄПіЮЊЃКUЃН1ЃЎ05ЃЌIЃН1ЃЎ0ЃЌcosІеЃН0ЃЎ9(жЭКѓ)ЁЃЗТецжаОљСюtЃН0ЃЎ5 sЪБЗЂЩњЛњЖЫШ§ЯрЭЛШЛЖЬТЗЙЪеЯЃЌЗжБ№ШЁШчЯТЧщПіЖдЦфНјааЗТецЃК ЖдБШвдЩЯЫФжжЧщПіЕФЗТецНсЙћЃЌПЩвдПДГідкЯрЭЌЕФЖЬТЗГжајЪБМф0ЃЎ38 sЧщПіЯТЃЌгЩгкРјДХЕїНкЦїЕФздЖЏЕїНкзїгУЃЌЪфГіЕФРјДХЕчдДЕчбЙЫцзХЛњЖЫЕчбЙЕФДѓаЁБфЛЏНјааЕїећЃЌНЯКУЕиЮЌГжЗЂЕчЛњЕФЛњЖЫЕчбЙЃЌЪЙЕУЗЂЕчЛњ жеУЛгаЪЇВНЃЌЖјУЛгаРјДХЕїНкЦїЕФЗЂЕчЛњдкЯрЭЌЕФЙЪеЯЬѕМўЯТ жеЪЇВНЁЃПЩМћздЖЏ РјДХЕїНкЦїЖдЬсИпЯЕЭГЕФднЬЌЮШЖЈадгавЛЖЈЕФзїгУЁЃЕЋЪЧШчЙћЖЬТЗГжајЪБМфЙ§ГЄЃЌЗЂЕчЛњНЋЛсгыЯЕЭГЪЇШЅЭЌВНЁЃОЙ§ЗТецМЦЫуЃЌдкгаЁЂЮоРјДХЕїНкЦїЕФСНжжЧщПіЯТЃЌДЫЕЅЛњЖдЮоЧюДѓЯЕЭГдкЙЪеЯЯТЕФМЋЯоЧаГ§ЪБМфЗжБ№ЮЊ0ЃЎ413 4 sКЭ0ЃЎ375 8 sЁЃ ОЕжїжсЕФНЛЕуЛёЕУЁЃ 5ЃЎ2ЁЁШ§зшПЙдЊМўЪЇВНБЃЛЄЕФећЖЈМЦЫу ЦфжаxtЁЂxlЁЂxsЗжБ№ЮЊБфбЙЦїЕчПЙЁЂЯпТЗЕчПЙКЭЯЕЭГЕШжЕЕчПЙЃЌОљЮЊБъчлжЕЃЌZnЮЊзшПЙЛљжЕЃЌlЮЊЯпТЗГЄЖШЃЌЕЅЮЛkmЃЌx1ЮЊЕМЯпЕЅЮЛГЄЖШЕФЕчПЙЁЃ ЭИОЕдкRЃXЦНУцЕкЂѓЯѓЯоЕФ дЖЕуЕФзшПЙZBЃЌАДЭЌВНЕчЛњЕФзнжсднЬЌЕчПЙНјааећЖЈЃК АДееЛЌМЋМЬЕчЦїЂёЖЮКЭЂђЖЮЬјеЂЧјЕФвЊЧѓЃЌЕчПЙZCЕФећЖЈвЛАуПЩбЁБфбЙЦїЕчПЙЕФ90ЃЅЃК ЭИОЕжїжс(зшПЙЦїжБЯп)ЕФЧуаБНЧІеZвЛАубЁШЁ ІФsetЕФећЖЈЃК вЛАувЊЧѓМьВтЕФ ДѓЛЌВюЦЕТЪfsЃЎmaxЮЊ5 HzЃЌЫљвдІСmaxЃН180ЁуЁС(1Ѓ0ЃЎ05fsЃЎmax)ЃН135ЁуЃЌ ЭЈЙ§ЗТецМЦЫуЃЌЮЊБЃжЄЙЪеЯЧаГ§КѓЛњЖЫзшПЙЕуЮЛгкЭИОЕдВЭтЃЌШЁІФsetЃН125ЁуЃЌДЫЪБfsЃЎmaxЃН20ЁС(1ЃІСЃЏ180Ёу)Ёж6ЃЎ1 HzЁЃ Ждгк(1)ЁЂ(3)УЛгаЪЇВНЕФЧщПіЃЌШ§зшПЙдЊМўЪЇВНБЃЛЄУЛгаЖЏзїЃЛЖдгк(2)ЁЂ(4)ЪЇВНЕФЧщПіЃЌгЩгкзшПЙЙьМЃДЉЙ§ЭИОЕЃЌЖјЧвДЉдНЕФЪБМфДѓгк50 msЃЌЫљвдШ§зшПЙдЊМўЪЇВНБЃЛЄПЩППЖЏзїЁЃ H(N)ОиеѓЪЧвЛИіГЃЪ§еѓЃЌЫљвдB(N)ПЩЪТЯШРыЯпМЦЫуГіРДЁЃетбљЖрЯюЪНЗНГЬОЭзЊЛЏЮЊВюЗжЗНГЬЕФаЮЪНЃЌдйИљОндЄВтЪБПЬkІЄtЃЌМЦЫуГідЄВтЙІНЧжЕІФЁф(kІЄt)ЁЃЁЁЁЁ Ждгк****(1)ЁЂ(3)ВЛЪЇВНЕФЧщПіЃЌЙІНЧдЄВтжЕЪМжеУЛгаДѓгк180ЁуЃЌВЛТњзуЖЏзїХаОнЃЌБЃЛЄе§ШЗВЛЖЏЃЛЖдгк****(2)ЁЂ(4)ЪЇВНЕФЧщПіЃЌОљЬсЧАдЄВтГіЙІНЧДѓгк180ЁуЃЌТњзуЖЏзїХаОнЃЌБЃЛЄе§ШЗЖЏзїЁЃПЩМћИФНјЕФШ§зшПЙдЊМўЪЇВНБЃЛЄФмЬсЧАдЄВтГіЗЂЕчЛњЕФЪЇВНЧщПіЃЌЦфЪБМфЬсЧАСПЮЊвжжЦЪЇВНЁЂБЃГжЗЂЕчЛњЮШЖЈ****ПЩФмЁЃ
ЙиМќДЪЃКднЬЌЮШЖЈЃЛеёЕДжааФЃЛећЖЈМЦЫуЃЛЪЇВНБЃЛЄ
1ЁЁв§бд
ЕчСІЯЕЭГЮШЖЈадЮЪЬтЪЧжИЕчСІЯЕЭГдЫаажаЪмЕНШХЖЏжЎКѓФмЗёМЬајБЃГжЗЂЕчЛњМфЭЌВНдЫааЕФЮЪЬтЁЃИљОнШХЖЏДѓаЁЫљШЗЖЈЕФЮШЖЈЮЪЬтЕФаджЪЃЌАбЫќЗжЮЊОВЬЌЮШЖЈКЭднЬЌЮШЖЈЁЃЫљЮНЕчСІЯЕЭГОВЬЌЮШЖЈадЃЌвЛАуЪЧжИЕчСІЯЕЭГдкдЫаажаЪмЕНЮЂаЁШХЖЏКѓЃЌЖРСЂЕиЛжИДЕНЫќдРДЕФдЫаазДЬЌЕФФмСІЁЃЕчСІЯЕЭГОпгаднЬЌЮШЖЈадЃЌвЛАуЪЧжИЕчСІЯЕЭГдке§ГЃдЫааЪБЃЌЪмЕНвЛИіДѓЕФШХЖЏКѓЃЌФмДгдРДЕФдЫаазДЬЌЃЌЙ§ЖЩЕНаТЕФдЫаазДЬЌЃЌВЂдкаТЕФдЫаазДЬЌЯТЮШЖЈЕидЫааЃЌЖјднЬЌВЛЮШЖЈЕФКѓЙћдђЪЧЯЕЭГЪЇШЅЭЌВНЁЃ
в§Ц№ЕчСІЯЕЭГДѓШХЖЏЕФдвђжївЊгаЯТСаМИжжЃК
(1)ИККЩЕФЭЛШЛБфЛЏЃЌШчЭЖШыЛђЧаГ§ДѓШнСПЕФгУЛЇЕШЃЛ
(2)ЧаГ§ЛђЭЖШыЯЕЭГЕФжївЊдЊМўЃЌШчЗЂЕчЛњЁЂБфбЙЦїМАЯпТЗЕШЃЛ
(3)ЗЂЩњЖЬТЗЙЪеЯЁЃ
ЦфжаЖЬТЗЙЪеЯЕФШХЖЏ ЮЊбЯжиЃЌГЃвдДЫзїЮЊМьбщЯЕЭГЪЧЗёОпгаднЬЌЮШЖЈЕФвРОнЁЃ
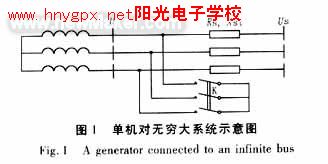
БОЮФеыЖдШ§ЯрЭЛШЛЖЬТЗЙЪеЯв§Ц№ЕФЪЇВНЙ§ГЬЃЌРћгУCЃЋЃЋгябдБраДСЫЗТецГЬађЃЌЖдОпгаЕїЫйЦїКЭРјДХЛЗНкЕФЦћТжЗЂЕчЛњЗЂЩњШ§ЯрЭЛШЛЖЬТЗЙЪеЯКѓЪЇВНЕФЖЏЬЌЙ§ГЬНјааЗТецЃЌВЂЭЈЙ§здБрЕФжїЩшБИећЖЈМЦЫуШэМўНјааећЖЈЃЌРћгУЗТецКЭећЖЈНсЙћЖдШ§зшПЙдЊМўЪЇВНБЃЛЄКЭИФНјаЭШ§зшПЙдЊМўЪЇВНБЃЛЄНјааЗжЮіЁЃ
2ЁЁЪ§бЇФЃаЭ
ЗТецжаЃЌЗЂЕчЛњзщВЩгУЕФЪ§бЇФЃаЭЮЊЕЅЛњЖдЮоЧюДѓЯЕЭГЃЌШчЭМ1ЫљЪОЁЃ
2ЃЎ1ЁЁЗЂЕчЛњЕФЪ§бЇФЃаЭ
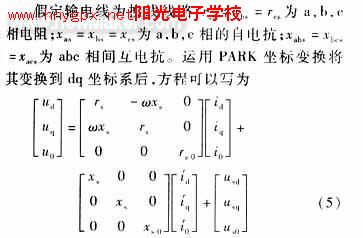
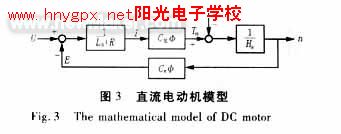
ВЩгУPARKЗНГЬЃл1ЃнЖдЗЂЕчЛњНјааЪ§бЇНЈФЃЁЃНЈФЃЙ§ГЬжаЃЌГ§ПМТЧЗЂЕчЛњЛњЖЫЕчбЙКЭЛњЖЫЕчСїЕФБфЛЏвдМАзЊзгРјДХЕчСїКЭРјДХЕчбЙЕФБфЛЏЭтЃЌЛЙПМТЧСЫЗЂЕчЛњЕФЙІНЧІФКЭзЊВюsЕФБфЛЏЧщПіЁЃЦфОиеѓаЮЪНШчЯТЃК
 ІиЮЊЗЂЕчЛњЕФЭЌВННЧЫйЖШЁЃ
ІиЮЊЗЂЕчЛњЕФЭЌВННЧЫйЖШЁЃ
2ЃЎ2ЁЁЪфЕчЯЕЭГЕФЪ§бЇФЃаЭ
ЪфЕчЯЕЭГдкabcзјБъЯЕЯТЕФЕчбЙЗНГЬЮЊ

2ЃЎ3ЁЁЕїЫйЯЕЭГЕФЪ§бЇФЃаЭ
ЮЊСЫПижЦдЖЏЛњЯђЗЂЕчЛњЪфГіЕФЛњаЕЙІТЪЃЌвдМАдкВЂСадЫааЕФЗЂЕчЛњжЎМфКЯРэЕиЗжХфИККЩЃЌУПвЛЬЈдЖЏЛњЖМХфжУСЫЕїЫйЦїЁЃдЖЏЛњКЭЕїЫйЦїЕФзщКЯЙЙГЩСЫЗЂЕчЛњЕФЕїЫйЯЕЭГЁЃ
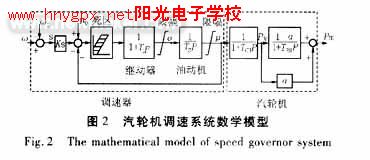
ЙњФкЭтЕФДѓаЭЦћТжЛњзщЃЌДѓЖМВЩгУжаМфдйШШЪНЦћТжЛњЃЌгЩгквЛНзФЃаЭУЛгаМЦМАжаМфдйШШеєЦћШнЛ§аЇгІЃЌЙ§гкДжВкЃЛШ§НзФЃаЭгжгааЉЗБЫіЃЌдкБОЮФЕФОЋЖШвЊЧѓЯТЃЌЖдЦћТжЛњЕФЗТецВЩгУЖўНзФЃаЭЃЌЦфДЋЕнКЏЪ§ПђЭМШчЭМ2ЫљЪОЁЃ
РјДХЯЕЭГЪЧЗЂЕчЛњЕФживЊзщГЩВПЗжЃЌЖдЕчСІЯЕЭГМАЗЂЕчЛњБОЩэЕФАВШЋгаКмДѓЕФгАЯьЁЃЯжДњЕФДѓШнСПЦћТжЗЂЕчЛњЙуЗКВЩгУАыЕМЬхРјДХЯЕЭГЃЌГЃгУЕФгаЫќРјОВжЙЙшећСїЦїРјДХЯЕЭГЁЂЫќРја§зЊАыЕМЬхРјДХЯЕЭГ(МДЮоЫЂРјДХ)ЁЂздВЂРјАыЕМЬхРјДХЯЕЭГМАздИДРјАыЕМЬхРјДХЯЕЭГЕШЁЃ
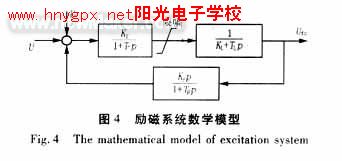
БОЮФИљОнРјДХЕїНкЯЕЭГЕФдРэМАЖЏзїЬиадЃЌЪЙгУСЫвЛжжМђЛЏЕФОпгаПЩПиЙшРјДХЕїНкЦїЕФНЛСїРјДХЯЕЭГЕФЪ§бЇФЃаЭЃЌШчЭМ4ЫљЪОЁЃ
БОЮФЖдФЃФтЗЂЕчЛњзщЗЂЩњШ§ЯрЖЬТЗЙЪеЯв§Ц№ЕФЪЇВНЙ§ГЬНјааЗТецЃЌВЂЭЌЪЕбщНсЙћНјааСЫЖдБШЁЃ
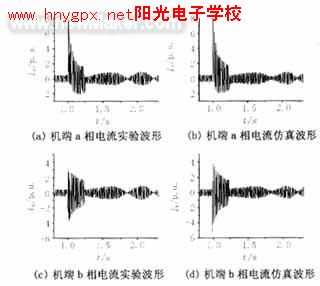
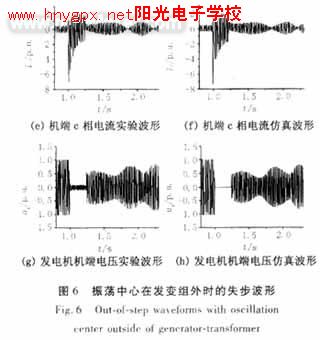
НјааЪЕбщЕФФЃФтЗЂЕчЛњзщЪЧвўМЋЛњЃЌЦфЖюЖЈВЮЪ§ЃКSNЃН30 kVЁЄAЃЌUNЃН400 VЃЌINЃН43ЃЎ3 AЃЌcosІеNЃН0ЃЎ8ЁЃЪЕбщМЧТМСЫЗЂЕчЛњЛњЖЫШ§ЯрЖЬТЗв§Ц№ЕФЪЇВНЃЌеёЕДжааФЃл2ЃнЗжБ№дкЗЂБфзщФкКЭЗЂБфзщЭтЕФЪЕбщНсЙћЁЃЯТУцСаГіеёЕДжааФдкЗЂБфзщФкКЭеёЕДжааФдкЗЂБфзщЭтСНжжЧщПіЯТЕФЗТецНсЙћКЭЪЕбщВЈаЮЁЃЭМ5жаЃЌЯпТЗзшПЙЮЊrsЃН0ЃЎ036 61ЃЌxsЃН0ЃЎ418 44ЃЌЙЪеЯЧАдЫаазДПіЮЊUЃН0ЃЎ89ЃЌIЃН0ЃЎ67ЃЌcosІеЃН0ЃЎ99(жЭКѓ)(БОЮФВЩгУГЃгУЕФПЩФцЛЅИаЯЕЪ§ЕФБъчлжЕЯЕЭГ)ЃЌЗЂЩњШ§ЯрЖЬТЗЙЪеЯКѓЃЌО0ЃЎ225 sЧаГ§ЙЪеЯЕФЪЕбщВЈаЮКЭЗТецВЈаЮЃЛЭМ6жаЃЌЯпТЗзшПЙЮЊrsЃН0ЃЎ08ЃЌxsЃН1ЃЎ 528 44ЃЌЙЪеЯЧАдЫаазДПіЮЊUЃН1ЃЎ03ЃЌIЃН0ЃЎ45ЃЌcosІеЃН0ЃЎ90(жЭКѓ)ЃЌЗЂЩњШ§ЯрЖЬТЗЙЪеЯКѓЃЌО0ЃЎ24 sЧаГ§ЙЪеЯЕФЪЕбщВЈаЮКЭЗТецВЈаЮЁЃ 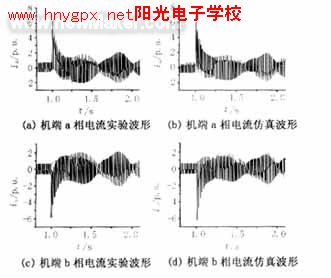

4ЁЁФГЕчГЇ300 MWЦћТжЗЂЕчЛњЗТецМЦЫу
БОНкЖдЪЕМЪЕчГЇ300 MWЦћТжЗЂЕчЛњзщНјааЗТецЃЌЦфЖюЖЈВЮЪ§ЮЊЃК 
(1)РјДХЕїНкЦїВЛЖЏзїЃЌО0ЃЎ3 sЧаГ§ЙЪеЯЃЛ
(2)РјДХЕїНкЦїВЛЖЏзїЃЌО0ЃЎ38 sЧаГ§ЙЪеЯЃЛ
(3)РјДХЕїНкЦїЖЏзїЃЌО0ЃЎ38 sЧаГ§ЙЪеЯЃЛ
(4)РјДХЕїНкЦїЖЏзїЃЌО0ЃЎ415 sЧаГ§ЙЪеЯЃЛЁЁЁЁ
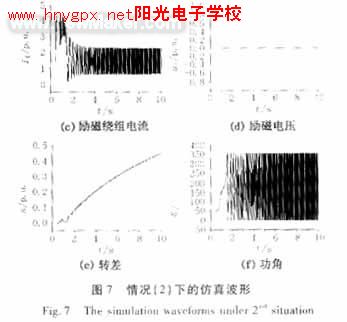
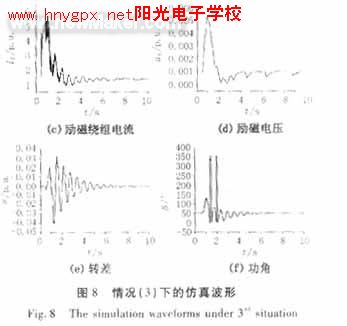
ЭЈЙ§ЗТецПЩвдЗЂЯжЃКЧщПі(1)ЁЂ(3)ОЙ§МИДЮеёЕДКѓЃЌеёЗљж№НЅЫЅМѕЃЌ КѓБЃГжЮШЖЈЃЛЧщПі(2)ЁЂ(4)жаЃЌЗЂЕчЛњеёЕДгњРДгњЧПСвЃЌ жеЕМжТЪЇВНЁЃЯТУцСаГіЧщПі(2)КЭ(3)ЕФЗТецНсЙћ(МћЭМ7ЃЌЭМ8)ЁЃ 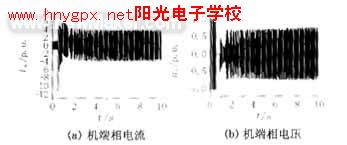

5ЁЁШ§зшПЙдЊМўЪЇВНБЃЛЄ
ОЁЙмФПЧАЕФЪЇВНБЃЛЄгаКмЖржжЃЌЕЋЪЧЗЂЕчЛњЕФЙІНЧБфЛЏзДПіКЭЗЂЕчЛњБОЩэФмСПЕФЦНКтФмСІЪЧКтСПЗЂЕчЛњдЫаазДПігыЮШЖЈадЕФИљБОЃЌЗЂЕчЛњЕФЪЇВНБЃЛЄгыдЄВтЗНАИвВЖМЪЧЮЇШЦетСНЕуНјвЛВНЗЂеЙКЭбнБфЕФЃЌЯТУцгУЗТецЕФНсЙћРДЗжЮіШ§зшПЙдЊМўЪЇВНБЃЛЄЁЃ
5ЃЎ1ЁЁШ§зшПЙдЊМўЪЇВНБЃЛЄЕФдРэ
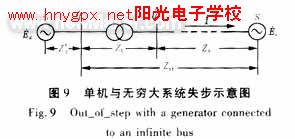
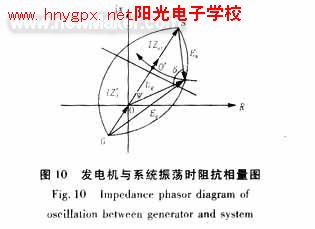
ШчЭМ9ЫљЪОЕЅЛњЁЊЮоЧюДѓЯЕЭГЗЂЩњеёЕДЪБЃЌМйЩшИїзшПЙЕФзшПЙНЧЯрЕШЃЌдђЗЂЕчЛњгыЯЕЭГжЎМфЕФЙІНЧІФЪЧгЩЛњЖЫВтСПзшПЙZjКЭЗЂЕчЛњднЬЌзшПЙвдМАЗЂЕчЛњгыЯЕЭГЕФСЊЯЕЕчПЙZstЫљзщГЩЕФЗтБезшПЙШ§НЧаЮРДОіЖЈЁЃИїзшПЙЗжБ№ГЫвдЕчСїЃЌПЩЕУИїЕчбЙЯђСПЃЌШчЭМ10ЫљЪОЃЌЦфжаEgгыEsЯђСПжЎМфЕФЯр 
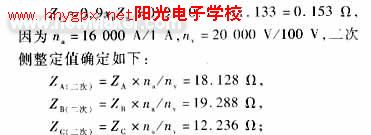
ЭЈЙ§здБрЕФЗЂБфзщБЃЛЄећЖЈМЦЫуШэМўЖдЪЇВНБЃЛЄНјааећЖЈЃЌЪзЯШгУвЛДЮВрЙЋгУВЮЪ§НЋЗЂЕчЛњЁЂБфбЙЦїЁЂЯпТЗЁЂЯЕЭГЕчПЙЕШЖМелКЯЕНЛњЖЫЕчбЙМЖЕФБъчлжЕЃЌМЦЫуЙ§ГЬШчЯТЃК 
ЭИОЕдкRЃXЦНУцЩЯЕкЂёЯѓЯоЕФ дЖЕуЕФзшПЙZAАДЛњЖЫжСЮоЯоДѓЯЕЭГжЎМфЕФСЊЯЕзшПЙZstНјааећЖЈЃК 


ЮЊБЃжЄЛњзщ ДѓИККЩЪБЕФ аЁзшПЙrLЃЎminЮЛгкЭИОЕжЎЭтЃЌвдБЃжЄБЃЛЄЕФЖЏзїбЁдёадЃЌЮЊДЫбЁдё 
5ЃЎ3ЁЁШ§зшПЙдЊМўЪЇВНБЃЛЄЕФгІгУ
ЯТУцгІгУ5ЃЎ2НкећЖЈЕФШ§зшПЙдЊМўЪЇВНБЃЛЄЃЌЗжБ№ЖдЕк4НкЫФжжЧщПіЕФЗТецНјааЬжТлЁЃзшПЙЙьМЃгыЭИОЕжїжсЕФМаНЧ(МДЙІНЧ)ЮЊ125ЁуЁЂ180ЁуЁЂ235ЁуЕФЪБПЬЗжБ№МЧЮЊ ЗТецжаЙІНЧЪЧжБНгЭЈЙ§
ЗТецжаЙІНЧЪЧжБНгЭЈЙ§ ЕФ(дкЪЕМЪжаПЩвддкЗЂЕчЛњзЊзгЩЯАВзАВтЫйзАжУРДЪЕЯж)ЃЌгыЧАУцгУзшПЙЙьМЃМфНгМЦЫуЙІНЧЕФНсЙћБШНЯЃЌМћБэ1ЁЃ
ЕФ(дкЪЕМЪжаПЩвддкЗЂЕчЛњзЊзгЩЯАВзАВтЫйзАжУРДЪЕЯж)ЃЌгыЧАУцгУзшПЙЙьМЃМфНгМЦЫуЙІНЧЕФНсЙћБШНЯЃЌМћБэ1ЁЃ 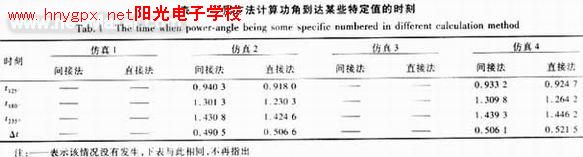
5ЃЎ4ЁЁИФНјаЭШ§зшПЙдЊМўЪЇВНБЃЛЄ
Ш§зшПЙдЊМўЪЇВНБЃЛЄОЁЙмгаМјБ№ЖЬТЗгыеёЕДЁЂЪЇВНеёЕДгыЭЌВНвЁАкЕФФмСІЃЌЕЋЪЧЫќВЛОпБИдЄВтЙІФмЃЌБЃЛЄЖЏзїЕФНсЙћжЛФмЪЧЧаЛњЛђНтСаЃЌУЛгаЪБМфВЩШЁЯргІЕФвжжЦЪЇВНДыЪЉБЃГжЯЕЭГЮШЖЈЁЃМјгкДЫЃЌЮФЯзЃл3ЃнЬсГідкДЫШ§зшПЙдЊМўЪЇВНБЃЛЄЕФЛљДЁЩЯМгвдИФНјЃЌМЦЫуЗЂЕчЛњгыЯЕЭГжЎМфЕФЙІНЧЕФЗНЗЈгыШ§зшПЙдЊМўЪЇВНБЃЛЄжаЕФЗНЗЈЯрЭЌЃЌгЩЛњЖЫВтСПзшПЙМфНгЫуГіЃЌШЛКѓЭЈЙ§ФГжжЫуЗЈРДдЄВтЙІНЧЕФБфЛЏЙьМЃЁЃЁЁЁЁ
БОЮФВЩгУЖрЯюЪНЛиЙщФЃаЭЖдЙІНЧНјаадЄВтЃК ЮЊНЋРДФГвЛЪБПЬЙІНЧІФ(t)ЕФдЄВтжЕЃЌa0ЁЂa1ЁamИљОнРњЪЗЪ§ОнІФ(ІЄt)ЁІФ(NЁЄІЄt)ЃЌгУ аЁЖўГЫЗЈАДAmЃНB(N)ЁЄІФ(N)дЄВтЃЌЦфжа
ЮЊНЋРДФГвЛЪБПЬЙІНЧІФ(t)ЕФдЄВтжЕЃЌa0ЁЂa1ЁamИљОнРњЪЗЪ§ОнІФ(ІЄt)ЁІФ(NЁЄІЄt)ЃЌгУ аЁЖўГЫЗЈАДAmЃНB(N)ЁЄІФ(N)дЄВтЃЌЦфжа 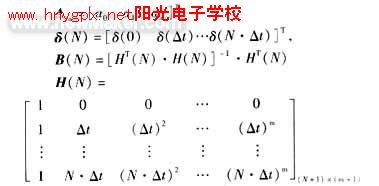
гІгУ5ЃЎ2НкећЖЈЕФZAЁЂZBжЕЃЌЖдЩЯЪіЫФжжЧщПіЕФЗТецНјааЪЇВНдЄВтЗжЮіЁЃШЁдЄВтЪБМфЮЊ300 msЃЌУПИє10 msЙлВьЕФ12ИіЪ§ОнзщГЩРњЪЗЪ§ОнДАПкЃЌСЌај3ДЮдЄВтГіЪЇВНКѓ(ЙІНЧДѓгк180Ёу)ЗЂГіИцОЏаХ КХЃЌЩшЦфЪБПЬЮЊt1ЃЌЕНДяЙІНЧ180ЁуЕФЪБПЬЮЊt0ЃЌЬсЧАдЄВтСПЮЊІЄtЁЃдЄВтЙ§ГЬжаЮЊЬсИпдЄВтМЦЫуОЋЖШЃЌВЩгУЙіЖЏдЄВтЃЌВЛЖЯВЩгУаТЪ§ОнЃЌгУ аТЕФВЩбљжЕИќаТдЄВтЪ§ОнДАЕФЪ§ОнЁЃБэ2ЗжБ№СаОйСЫМфНгКЭжБНгСНжжЗНЗЈМЦЫуЙІНЧЪБЕФЪЇВНдЄВтНсЙћЁЃ 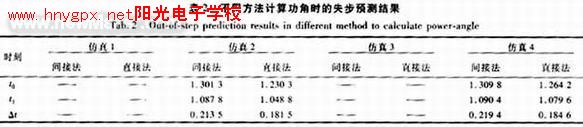
гЩгкZstКЭдкЪЇВНЙ§ГЬжаВЛЪЧЙЬЖЈВЛБфЕФЃЌвђДЫЭЈЙ§зшПЙЙьМЃМфНгМЦЫуЙІНЧВЂВЛОЋШЗЃЌРэТлЩЯНВЛљгкГѕЯрНЧКЭзЊВюМЦЫуЙІНЧЕФЗНЗЈИќзМШЗЁЃЭЈЙ§БШНЯБэ1КЭБэ2ЃЌСНжжЗНЗЈМЦЫуГіРДЕФНсЙћЯрВюВЛДѓЁЃ
6ЁЁНсТл
ЮЊбаОПЗЂЕчЛњШ§ЯрЖЬТЗв§Ц№ЪЇВНЕФЖЏЬЌЙ§ГЬМАЦфБЃЛЄЃЌБОЮФНЈСЂСЫАќРЈРјДХЕїНкЦїЁЂЕїЫйЦїЁЂЦћТжЛњКЭЗЂЕчЛњдкФкЕФЗЂЕчЛњЯЕЭГФЃаЭЃЌЪЕбщКЭ****НсЙћБэУїЪ§бЇФЃаЭКЭМЦЫуЗНЗЈЪЧе§ШЗЕФЁЃЖдФГЕчГЇЕФ300 MWЦћТжЗЂЕчЛњзщЗжВЛЭЌЧщПіНјаа****МЦЫуЃЌЫЕУїСЫРјДХЕїНкЦїЖдЬсИпЯЕЭГднЬЌЮШЖЈадЕФзїгУЃЌВЂРћгУ****НсЙћЖдШ§зшПЙдЊМўЪЇВНБЃЛЄКЭИФНјаЭШ§зшПЙдЊМўЪЇВНБЃЛЄНјааећЖЈМЦЫуКЭЗжЮіЃЌбщжЄСЫИФНјаЭШ§зшПЙдЊМўЪЇВНБЃЛЄгаНЯКУЕФдЄВтЙІФм




